使 Python 程式作為 Windows 服務執行之事項
本文說明在 Windows 作業系統上,如何將 Python 程式以 Windows 服務 (Windows Service) 的模式執行。這可以讓程式於系統開機後,自動在背景中工作。
- 使用 NSSM - the Non-Sucking Service Manager 作為服務管理與啟動工具。
- 常用資料夾與 Python 程式執行時的帳號。
為何需要 nssm
在 Linux/Unix 系統的 Python 程序員眼中,想讓一個 Python 程式在開機後自動啟動於背景中工作,是一件很簡單的事 (這種開機後就在背景中工作的程式, Linux/Unix 稱為 daemon ,而在 Windows 上,就是 Windows 服務 (Windows Service) )。 最直覺的做法,不過是編輯 /etc/rc.local ,加上一行 Python 指令,並在指令最後補上一個 & 字元。但同一件事,在 Windows 上就不是那麼簡單了。
首先, Windows 對服務程式要求不一樣的啟動方式。如果你使用 Python.org 釋出的 Windows 版本 Python ,按一般 Python 程式的寫法,你的程式並不能作為 Windows 服務啟動。這幾乎是所有 Windows 的解譯式開發工具都會碰上的狀況。這時,你需要一個發動器作為前導。將這個發動器以 Windows 服務啟動,再由它導入你的 Python 程式。
我個人試用過幾個發動器之經驗,以 NSSM - the Non-Sucking Service Manager 最容易使用。發動器中,最基礎的是微軟釋出的 srvany ,但它實在太簡略,還得動用 regedit 編輯登錄檔。其他的發動器則有著太過老舊、與 Windows 10 不相容等狀況。但 NSSM 沒有這些問題。它不只有 GUI 介面,還可用命令列參數的形式,管理服務內容。
我們先來看看 Python 在 Linux/Unix 系統上的 daemon 程式典型寫法。程式會在一個迴圈內持續工作,直到管理者送出一個終止訊號或指令才跳出迴圈,停止服務。
v1 - python-service-sample
#!/usr/bin/python3
import sys, os, time
import signal
import paho.mqtt.publish as publish
Service_Looping = False
def mq_print(msg):
publish.single("tw/rocksaying/test", msg, hostname="iot.eclipse.org")
def stop_all(signum, frame):
global Service_Looping
Service_Looping = False
mq_print("signal %d" % signum)
signal.signal(signal.SIGTERM, stop_all)
signal.signal(signal.SIGINT, stop_all) # Ctrl-C
# Windows: stop service will send SIGINT to process.
Service_Looping = True
# while Service_Looping:
for i in range(3):
if not Service_Looping:
break
mq_print("heartbeat")
time.sleep(3)
mq_print("exit")
sys.exit(0)
# 不論你的程式是否正常結束,nssm 都將重新執行此程式,
# 除非你在控制台的「服務」功能中,停止這個服務。
使用 nssm 新增 Windows 服務
前述之示範程式配合 NSSM 的話,不必修改內容就可搬到 Windows 系統當 Windows 服務工作。
先列出我的 Windows 環境下之相關程式與文件的路徑。各位使用時,應按自己的情形調整。
- NSSM ,單一執行檔,我放在: C:\Windows\nssm.exe
- Python , 按預設安裝,會放一個執行檔在 Windows 系統目錄: C:\Windows\py.exe
- 範例程式目錄: D:\workspace\test
開啟一個命令視窗,輸入指令 nssm install <service_name> ,NSSM 就會出現 GUI 視窗,讓你輸入你要執行的程式和各項參數。 service_name 請換成你想用的服務名稱,名稱不能與系統中已經存在的服務相同。如下:
C:> nssm install python-service-sample
NSSM GUI 如下圖:
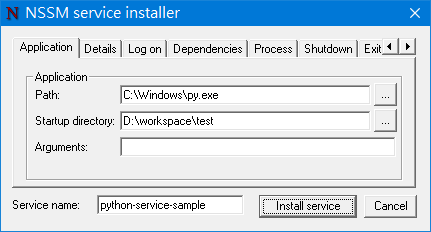
NSSM GUI 可編輯項目相當多。但最主要的是第一頁 Application 應用程式的路徑、啟動後的工作目錄以及執行參數。
應用程式是指我們將要委托 nssm 發動的程式,而不是 nssm 自己。對 Python 程式而言,此處要填上 Python 解譯器的路徑。然後參數欄要填上 Python 程式文件的路徑,交給 Python 解譯器執行。我的環境就分別填入 C:\Windows\py.exe 和 D:\workspace\test\python-service-sample.py。按下 「Install service」鈕後就會在系統中新增一個服務了。
接著開啟「控制台/系統管理工具/服務」,找到剛剛新增的 Python 程式的服務。預設會在下次開機後自動啟動此服務。但此時應該還未啟動。如下圖:
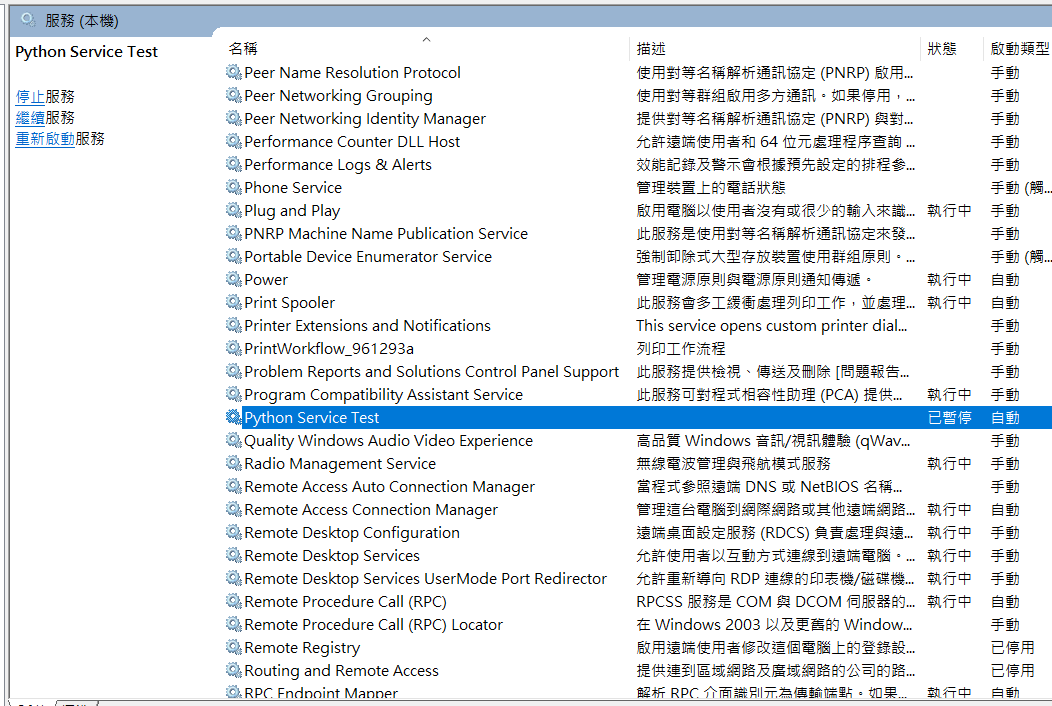
請按下「啟動」鈕啟動此服務,觀察 MQTT 主題,確認此示範程式是否正常工作。例如我用 mosquitto_sub 訂閱主題後,就會看到下列訊息:
rock:~$ mosquitto_sub -v -h iot.eclipse.org -t tw/rocksaying/#
tw/rocksaying/test heartbeat
tw/rocksaying/test heartbeat
tw/rocksaying/test heartbeat
tw/rocksaying/test exit
tw/rocksaying/test heartbeat
tw/rocksaying/test heartbeat
tw/rocksaying/test heartbeat
tw/rocksaying/test exit
tw/rocksaying/test heartbeat
tw/rocksaying/test signal 2
tw/rocksaying/test exit
示範程式原本應該使用無限次數迴圈,但我故意使用一個執行三次就會結束的迴圈。觀察執行時的 MQTT 訊息,我們會查覺就算程式送出三次 heartbeat 訊息後結束了,但過幾秒後又會看到程式送出的訊息。這其實是 nssm 的輔助功能。不論你的程式是否正常結束,nssm 都將重新執行此程式,除非你在控制台的「服務」畫面中,停止這個服務。這可以保證程式作為背景服務的永續性。
我們再到「控制台/系統管理工具/服務」,停止 Python 程式的服務。 Windows 將對 nssm 和 Python 程式送出 SIGINT 訊號,程式接收到此訊號後便會設定迴圈狀態為 False 。而 nssm 也會結束,不會重新執行 Python 程式。
nssm 還提供了一些有用的輔助功能,例如:
- Dependencies: 可以指定相依服務。當指定的服務已經啟動了,才會執行你的程式服務。注意,此處要填入服務名稱,而不是顯示名稱。在「控制台/系統管理工具/服務」清單中,你看到的是顯示名稱。要查看服務的細項內容才會看到服務名稱。
- I/O: 可以將輸出入的內容重導向到指定的檔案中,這可以視為簡單 log 功能。你的程式服務必須擁有寫入檔案的權限。這點下面會再提。
- File rotation: 針對 I/O 重導向的 log 檔案設定循環動作。每幾秒或當記錄檔案超過多少位元組大小時,便將記錄檔案的內容歸零。避免檔案無限增長。
在「控制台/系統管理工具/服務」頁面調整的內容都是針對 nssm ,而不是我們委託 nssm 執行的 python 程式。針對委託程式的調整內容,應透過 nssm (使用 edit 或 set 參數)。
常用資料夾與 Python 程式執行時的帳號
在 Linux/Unix 系統上設計 daemon 程式時,若我們的程式需要讀取或儲存本地的檔案,通常需要知道一些常用資料夾的路徑,例如 TEMP 資料夾、帳號的家資料夾和目前工作資料夾。這些資料夾一般都允許程式的執行帳號讀寫內容。 Python 為我們提供了函數模組取得這些常用資料夾的路徑,例如 tempfile.gettempdir(), os.getcwd() 。這些函數模組在 Windows 版本中也提供。基於程式跨平台設計之考量,我們應該儘可能使用這些函數。
Windows 服務執行時,預設的帳號身份是 SYSTEM 。當然你也可以在 nssm 的「Log on」頁面中指定其他的帳號身份。不同的帳號身份,主要影響了你的 Python 程式服務可以讀寫的檔案權限和可用資源多寡。例如程式執行時的家資料夾就因帳號身份而不同。
v2 - python-service-sample
將前面的示範程式改寫,加入常用資料夾路徑的取得函數,並顯示這些資料夾的讀寫權限。還顯示了帳號名稱、主機名稱和程式的參數清單。在設計服務程式時,一般都會需要這些資訊。
#!/usr/bin/python3
import sys, os, time
import signal
import paho.mqtt.publish as publish
import tempfile
import platform
from socket import gethostname
Service_Looping = False
def mq_print(msg):
publish.single("tw/rocksaying/test", msg, hostname="iot.eclipse.org")
def stop_all(signum, frame):
global Service_Looping
Service_Looping = False
mq_print("signal %d" % signum)
signal.signal(signal.SIGTERM, stop_all)
signal.signal(signal.SIGINT, stop_all) # Ctrl-C
# Windows: stop service will send SIGINT to process.
mq_print("SYSTEM: %s" % platform.system())
mq_print("ARGV: %s" % sys.argv)
# 「控制台/系統管理工具/服務」的「啟動參數」只傳給 nssm ,
# 不是傳給委託 nssm 執行的 python 程式
home_dir = os.path.expanduser('~user')
# env_home = os.environ['HOME'] # Unavailable in Windows
temp_dir = tempfile.gettempdir()
current_dir = os.getcwd()
mq_print("HOME:%s; TEMP:%s; Current:%s" %
(home_dir, temp_dir, current_dir))
if os.access(home_dir + "/..", os.W_OK):
home_dir_state = "Writable"
else:
home_dir_state = "Read Only"
if os.access(temp_dir, os.W_OK):
temp_dir_state = "Writable"
else:
temp_dir_state = "Read Only"
if os.access("C:/ProgramData", os.W_OK):
programdata_dir_state = "Writable"
else:
programdata_dir_state = "Read Only"
if os.access("C:/Windows", os.W_OK):
windows_state = "Writable"
else:
windows_state = "Read Only"
mq_print("HOME ACCESS: %s; TEMP ACCESS: %s" %
(home_dir_state, temp_dir_state))
mq_print("DATA ACCESS: %s; WINDOWS ACCESS: %s" %
(programdata_dir_state, windows_state))
try:
username = os.getlogin()
except:
username = os.environ['LOGNAME']
mq_print("USERNAME = " + username)
mq_print("HOSTNAME = " + gethostname())
Service_Looping = True
while Service_Looping:
mq_print("heartbeat")
time.sleep(3)
mq_print("exit")
sys.exit(0)
平台移植注意事項
如果你的程式服務想在家資料夾下存取檔案的話,要注意這件事:當 Python 程式服務以預設的系統帳號執行時,家資料夾路徑可能是一個不存在的資料夾。例如在我的 Windows 10 系統上,系統服務帳號的家資料夾路徑是 C:\Windows\system32\config\user 。這個路徑不存在,但父資料夾 C:\Windows\system32\config 則可用且可寫入。
Linux/Unix 的 daemon 通常會以 root 身份執行,而且常用的資料夾會是 /etc, /var/log, /tmp 等系統資料夾。在 Python 函數模組中沒有對應的跨平台函數可用。如果你是想將使用這些系統資料夾的 Python 程式移植到 Windows 上使用,你會需要用到 platform.system() 作條件判斷,分別設定資料夾的路徑。