Raspberry Pi 使用 Grove LoRa 無線模組負擔 LoRa Gateway 角色
本案例於 Raspberry Pi 使用 Grove - LoRa Radio 模組,實作基本的 LoRa 無線應用。 Raspberry Pi 的角色是 LoRa Gateway 。它負責收集其他 LoRa 設備的訊號,再透過 Internet 發佈到 MQTT 頻道上。
作業系統與硬體支援
Grove LoRa Radio 模組的產品說明它不提供 Raspberry Pi 使用的 SDK 。但 Alexander Krause 為它寫了一個 Python 套件,名稱為 pyRFM 。各位可以在 Github 上取得 pyRFM 的源碼: erazor83/pyRFM。拜 Python 的跨平台特性所賜, pyRFM 一舉打破了 Grove LoRa Radio 的供應商對其他硬體平台支援不足的困境。只要可以運行 Python 環境的作業平台,都可以透過 pyRFM 使用 Grove LoRa Radio 。
我本人在下列平台中成功使用:
- Raspberry Pi 1/2/3: Raspbian 作業系統。
- x86 PC: Windows 10 作業系統 ,安裝 Python3 for win32 。
- x86 PC: Bash on Ubuntu on Windows 子系統。
- x86 PC: Debian 作業系統。
我都使用 Python 3 。
硬體連接
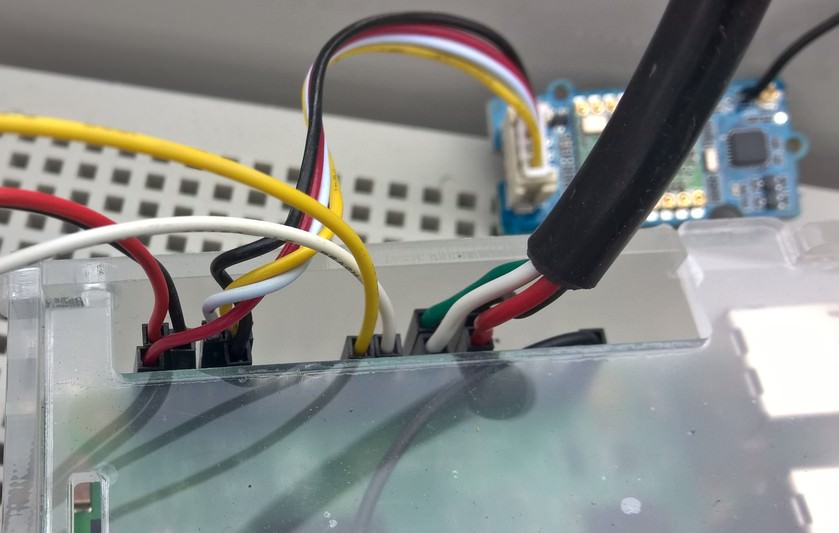
Grove LoRa Radio 模組被封裝為一個 UART 裝置。與 Raspberry Pi 連接時,要接在 GPIO 的 UART (serial 埠) 針腳。與 PC 連接時,則需要使用 USB to TTL 轉接模組。我個人用 CP2102 晶片或 FTDI FT232R 晶片的 USB to TTL 轉接模組。
Grove 模組隨附的連接線的母座規格不是 GPIO 用的杜邦端子規格,不能直接插上 GPIO 。所以你得準備 4 個杜邦母頭端子,動手剪掉連接線的其中一頭,壓接上杜邦母頭端子。
Grove LoRa Radio 支援 3.3V 與 5V 工作電壓,所以它的 VCC 接在 GPIO 的 3.3V 或 5V 針腳皆可。它的 TX 接到 GPIO 的 RX ; RX 接到 GPIO 的 TX 。 TX/RX 互接雖然是基本知識,但還是要再次提醒初學者。
Raspberry Pi 3 的 UART
Raspberry Pi 3 內建了藍牙模組,為此它改變了過去的硬體 UART 設置,改為 mini UART 。為了使用 Grove LoRa Radio ,我建議打開硬體 UART 設置。使用命令列工具 raspi-config ,選擇 Interfacing options 中的 Serial 項目。關閉 serial login shell 但啟用 serial port hardware 。這相當於在 config.txt 中加上 enable_uart=1 。
不論你是否啟用硬體 UART , Pi 3 都會建立 /dev/serial0 這個設備符號指向真正的 UART 設備。所以使用 pyRFM 時,應該以 /dev/serial0 作為連接埠參數。不建議直接用 /dev/ttyS0 或 /dev/ttyAMA0 。
UART 設備預設不允許一般使用者開啟。如果你想用一般使用者身份執行本文的程式,請將你的使用者 — 例如 pi — 加入 dialout 使用群組。指令如下:
$ sudo usermod -a -G dialout pi
LoRa 訊號接收程式
首先,你需要取得 pyRFM 源碼,或者從本文完整範例取得。然後手動安裝到 Python3 的套件目錄內。在 Pi 3 ,我安裝在 /usr/lib/python3.5/pyrfm 。如果你不是安裝在 Python3 預設的套件目錄內,你得在程式中用 sys.path.append() 加入 pyRFM 的路徑。
pyRFM 初始化時必須指定 serial port 參數。在 x86 PC 的 Linux 系統上,預設是 /dev/ttyS0 ;但在 Pi 3 ,則應該用 /dev/serial0 。原因在上節中說明了。至於 Windows 系統的話,參數的字串格式是 COM2 之類。數字部分則需自己到裝置管理員中查看。
基礎的 LoRa 訊號接收程式碼如下所示。完整範例可從我的源碼庫取得: LoRa-gateway 。
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import sys, os, signal
# the path to pyrfm library.
#sys.path.append(os.path.join(os.path.dirname(__file__), '..'))
import pyrfm
lora_settings = {
'id': 255, # my (gateway) lora id.
'll':{
'type':'rfm95'
},
'pl':{
'type': 'serial_seed',
'port': '/dev/serial0', # default UART port in Raspberry Pi 3
}
}
if len(sys.argv) >= 2:
lora_settings['pl']['port'] = sys.argv[1]
service_looping = False
def stop_all(*args):
global service_looping
service_looping = False
signal.signal(signal.SIGTERM, stop_all)
signal.signal(signal.SIGINT, stop_all) # Ctrl-C
print("LoRa Port: ", lora_settings['pl']['port'])
print("LoRa ID: ", lora_settings['id']) # 非必要
ll = pyrfm.getLL(lora_settings)
print("HW-Version: ", ll.getVersion())
if ll.setOpModeSleep(True, True):
ll.setFiFo()
ll.setOpModeIdle()
ll.setModemConfig('Bw125Cr45Sf128');
#ll.setModemConfig('Bw31_25Cr48Sf512'); # slow/long, and more than 2 seconds timeout
ll.setPreambleLength(8)
ll.setFrequency(434) # 頻率依你使用的 LoRa 模組規格而定
ll.setTxPower(13) # useRFO default is false.
service_looping = True
while service_looping:
if ll.waitRX(timeout=3):
data = ll.recv()
header = data[0:4]
# <to> <from> <id> <flags>
msg = array.array('B', data[4:]).tostring()
print("read %d bytes" % len(data))
print("header: ", header)
print("message: ", msg)
from_id = header[1]
if header[0] != lora_settings['id']:
print("recv_id is not matched")
continue
print("TODO received task")
sys.exit(0)Grove LoRa Radio 模組的單一訊息封包的資料量最長是 255 bytes (RFM_MAX_PAYLOAD_LEN)。但這之中包含了 pyRFM 用於表示封包標頭的 4 bytes 。所以實際上每個封包可以讓使用者放 251 bytes 。如果你的資料量超過 251 bytes ,就要拆開收發。
封包標頭的 4 bytes 預設分別代表 to, from, id, flags 。但實際上,這 4 個欄位的意義完全可由使用者自己決定。只要接收端和發送端的設計者先講好就行。
Grove LoRa Radio 的訊號發送模式是廣播模式,任何位在有效距離內的 LoRa 接收設備都可以收到訊號。所以在設計時,得要自己定義好訊號標頭欄位的意義,讓訊號接收程式可以判斷訊號要不要由自己處理。
我是按照 pyRFM 預設的欄位意義使用。用 to 欄位表示 LoRa 訊號的目標設備代號,用 from 欄位表示 LoRa 訊號的發送設備代號。至於 id 和 flags 欄位則未使用。在本案例中, Pi 3 的角色是 LoRa 接收設備,所以它的設備代號就是其他 LoRa 設備送出訊號的 to 設備代號。其他 LoRa 設備要在 to 欄位中填上你派給 Pi 3 的 LoRa 代號,這樣你的程式才可以根據訊號的 to 欄位內容,判斷這個訊號是不是自己要處理。
至於發送設備的設計內容,請參考 Arduino Serial 與 String 使用經驗 這篇文章。這篇文章提到它如何指定 to 欄位與 from 欄位的內容。
藉由定義 to 與 from 欄位的用途,就可以讓 Pi 3 的 LoRa 接收程式負擔起 LoRa Gateway 的角色。
發佈到 MQTT
Python 使用 MQTT 的方法,請參考 MQTT用戶端入門 - 三、Python 用戶端程式設計 。但配合 LoRa 使用時,則要注意程式的同步性。
Python 的 paho-mqtt 在發佈訊息時採用同步操作模式。這表示當它在連接網路、交握 MQTT 協定與讀寫 MQTT 封包內容的期間,其執行緒不能接收 LoRa 訊號。但其他 LoRa 發送設備可不會知道接收端程式現在有沒有空接收訊號,仍然照自己的步調發出 LoRa 訊號。為了避免漏接訊號,接收端程式應該運用 threading 和 queue 實作多線非同步設計。
本文的設計方式是主線接收 LoRa 訊號後,將訊號內容放入 queue 。另一條線則循環讀取 queue 的內容後發佈到 MQTT 頻道上。 Python 的 queue 容器支援資料同步操作。當程式呼叫 get() 方法時,若 queue 中沒有資料,就會被攔置等待資料。如此即可實現 LoRa 訊號接收執行緒與 MQTT 發佈執行緒之間的同步動作。
#!/usr/bin/python3
.
.
import threading, queue
import paho.mqtt.publish as publish
publishing_messages = queue.Queue(10000)
def append_publishing_message(topic, id, data):
if publishing_messages.full():
# drop oldest message.
publishing_messages.get()
publishing_messages.task_done()
publishing_messages.put((topic, id, data))
def publish_worker():
'''
daemon thread.
它會從 publishing_messages 中取出一筆待發佈訊息 (如果沒有則等待)。
接著會嘗試發佈這一筆訊息,直到成功或 publishing_messages 滿了為止。
在這一筆訊息發佈成功前,主執行緒仍然可以持續往 publishing_messages 中增加訊息。
若發佈失敗,且 publishing_messages 已滿,就會放棄這筆訊息,取出下一筆訊息。
否則等待重試。
'''
topic = None
data = None
sensor_id = 0
while True:
if data == None or publishing_messages.full(): # 佇列已滿時,則放棄尚未發佈的舊訊息
topic, sensor_id, data = publishing_messages.get()
publishing_messages.task_done()
# 待發佈訊息已由 data 保存,故現在就可釋放佇列,讓主執行緒繼續堆放訊息。
full_topic = "%s/sensor/%s/%d" % (mqtt_settings['topic_base'], topic, sensor_id)
# mqtt_auth = {
# 'username': mqtt_settings['username'],
# 'password': mqtt_settings['password']
# }
try:
publish.single(full_topic, data, qos=1,
hostname=mqtt_settings['host'], client_id=gethostname(), auth=mqtt_settings)
print("published")
topic = None
data = None
sensor_id = 0
except Exception as e:
logging.error("%s Retry publish later." % e)
time.sleep(10)
publish_thread = threading.Thread(target=publish_worker, daemon=True)
publish_thread.start()
if ll.setOpModeSleep(True, True):
.
.
while service_looping:
if ll.waitRX(timeout=3):
data = ll.recv()
.
.
# print("TODO received task")
append_publishing_message(topic, id, data)上列是參考設計。完整程式碼請看 LoRa-gateway@rocksources 。

上圖是配合完整範例附的 lora-sender.py 運作的情形。
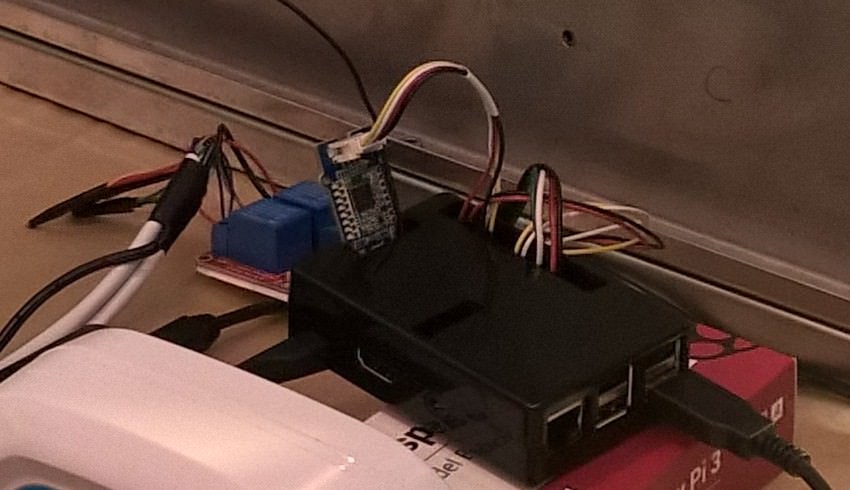
上圖是配合繼電器控制其他設備開關的案例。
程式資源
- 本文完整範例 。我修改過的 pyRFM ,增加了
setHeaderTo()和setHeaderFrom()方法。這是 Grove LoRa Radio Arduino 套件已實作,但 pyRFM 原作者未實作的方法。我加以補全。 - erazor83/pyRFM